PRiME releases free stereo matching algorithm for video
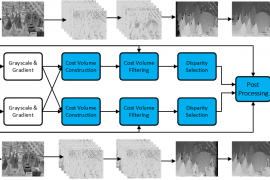
| Demonstrators, News, ToolsPRiME is pleased to announce the release of PRiME Stereo Match software – a heterogeneous and fully parallel stereo matching algorithm for video depth estimation, available in both OpenCL and C++. Stereo Matching is based on the disparity estimation algorithm. This is an algorithm which is designed to calculate 3D depth information about a scene […]